이번 글에서는 SLAM(Simultaneous Localization and Mapping) 기술을 제대로 이해하기 위해 반드시 선행되어야 할 배경 지식인 '모바일 로보틱스(Mobile Robotics)'에 대해 다뤄보겠습니다.
SLAM은 하늘에서 뚝 떨어진 기술이 아닙니다. 로봇이 고정된 자리에서 벗어나 스스로 움직이기 시작하면서, 즉 '모바일 로봇'이 탄생하면서 필연적으로 발생한 문제를 해결하기 위해 등장했습니다. 그렇다면 모바일 로봇은 기존 로봇과 무엇이 다르고, 왜 확률과 통계가 중요해졌는지 알아보겠습니다.
1. 고정된 로봇에서 움직이는 로봇으로
우리가 흔히 '산업용 로봇'이라고 부르는 기존의 로봇 팔(Manipulator)들은 공장에서 아주 중요한 역할을 해왔습니다. 하지만 이들에게는 명확한 한계가 존재했습니다.
🔧 기존 산업용 로봇의 특징
- 고정된 베이스(Fixed Base): 바닥에 단단히 고정되어 있어 이동할 수 없습니다.
- 제한된 작업 공간(Workspace): 팔을 뻗어 닿을 수 있는 범위 내에서만 작업이 가능합니다.
- 확장성의 한계: 작업 반경을 넓히려면 로봇 팔을 길게 만들어야 하는데, 이는 하중 문제와 비용 문제를 야기합니다.
넓은 공장에서 물건을 A지점에서 B지점(예: 100m 거리)으로 옮기려면 어떻게 해야 할까요? 기존 방식대로라면 수많은 로봇 팔을 릴레이 형식으로 배치해야 합니다. 이는 비용적으로 매우 비효율적입니다.
이를 해결하기 위해 레일(Rail)을 깔기도 했지만, 레일이 설치된 경로로만 이동할 수 있고 사람의 통행을 방해한다는 단점이 여전했습니다. 그래서 등장한 것이 바로 모바일 로봇(Mobile Robot)입니다.
🚀 모바일 로봇의 등장
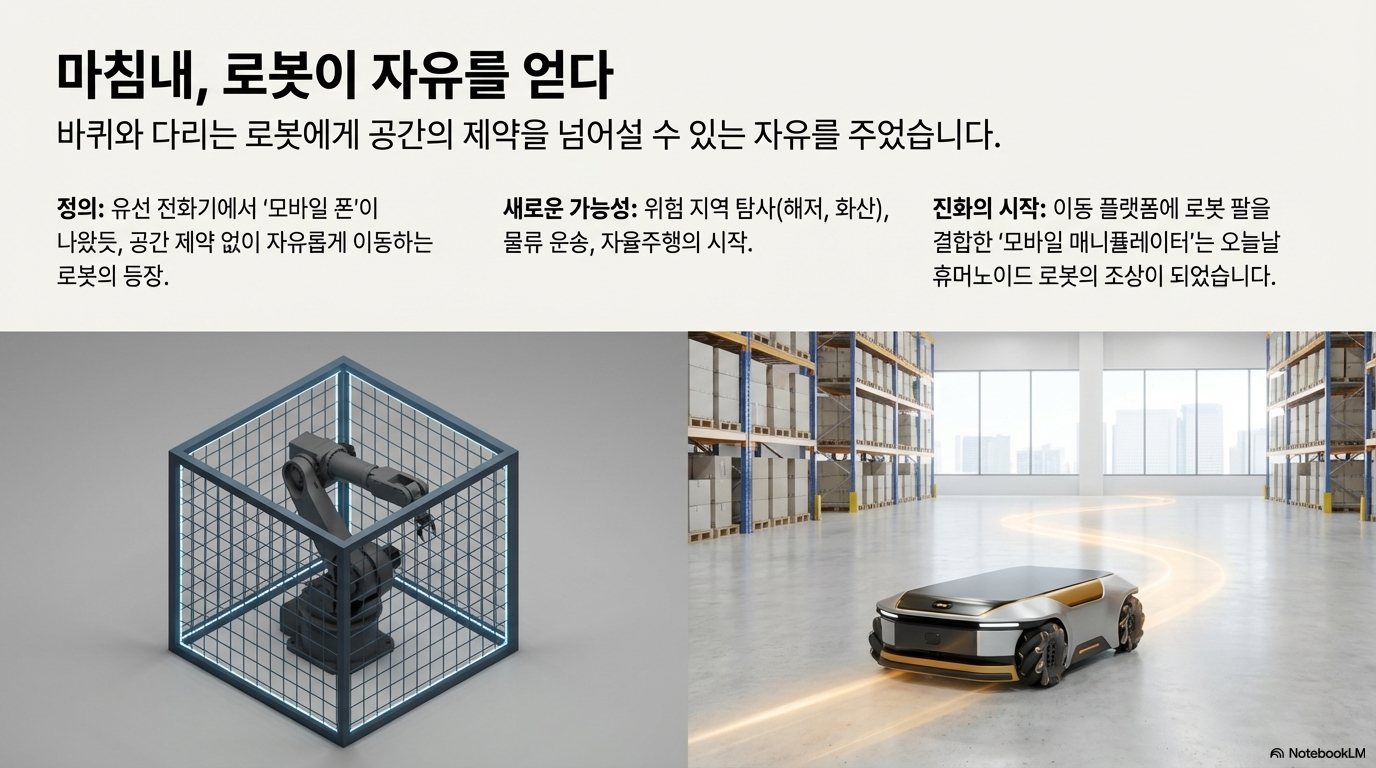
유선 전화기에서 자유로운 '모바일 폰'이 된 것처럼, 로봇에 바퀴나 다리를 달아 공간의 제약 없이 자유롭게 이동할 수 있게 되었습니다.
- 사람이 가기 힘든 위험 지역(화산, 해저, 원전 등) 탐사
- 물류 창고에서의 자동 운송
- 이동형 플랫폼 위에 로봇 팔을 얹은 모바일 매니퓰레이터(Mobile Manipulator) 및 휴머노이드로의 진화
2. '인지(Perception)'의 변화
로봇의 3대 요소는 인지(Perception) → 판단(Planning) → 제어(Control)입니다. 로봇이 이동하기 시작하면서 '인지'의 목적이 완전히 달라졌습니다.
- 산업용 로봇의 인지: 작업할 '물건'을 정확히 찾는 것이 목적.
- 모바일 로봇의 인지: 내가 이동할 수 있는 공간(Free Space)과 장애물(Wall)을 구분하는 것이 목적.
부딪히지 않고 목적지까지 가기 위해, 로봇은 끊임없이 주변 환경을 센서로 스캔하고 자신의 위치를 파악해야 합니다.

3. 센서와 데이터, 그리고 '노이즈(Noise)'
로봇은 다양한 센서를 통해 세상을 봅니다. 센서는 크게 두 가지로 나뉩니다.
- Exteroceptive Sensors (외부 인식 센서): 카메라, 라이다(LiDAR), 초음파 등 주변 환경을 측정.
- Proprioceptive Sensors (내부 인식 센서): 휠 인코더, IMU 등 로봇 자신의 움직임(속도, 가속도)을 측정.

⚠️ 완벽한 센서는 없다 (Noise의 문제)
초창기에는 "센서로 거리를 재고(1m), 그만큼 이동하고, 다시 재자"는 단순한 알고리즘을 사용했습니다. 하지만 현실 세계에서는 이 방식이 통하지 않습니다. 바로 센서 노이즈 때문입니다.

물리적인 거리가 1.0m라 해도, 센서는 온도, 습도, 진동, 전자기적 간섭 등에 의해 1.02m, 0.99m, 1.05m 등으로 매번 다르게 측정합니다. 로봇이 이 부정확한 데이터를 맹신하고 이동하면, 결국 벽에 충돌하거나 낭떠러지로 떨어지는 사고가 발생하게 됩니다.

움직이는 로봇은 한 위치에서 오랫동안 머물며 데이터를 모아 평균을 낼 수도 없습니다(계속 위치가 변하니까요). 그렇다면 이 불확실성을 어떻게 해결해야 할까요?

4. 확률론적 로보틱스 (Probabilistic Robotics)
로봇 공학자들은 수많은 실험 끝에 매우 중요한 사실을 깨닫습니다. 이 문장은 SLAM과 현대 로보틱스를 관통하는 핵심입니다.

센서 값을 하나의 정확한 '숫자'로 믿는 것이 아니라, 오차를 포함한 '확률 분포(예: 가우시안 분포)'로 다루기 시작한 것입니다.
"내 위치는 정확히 좌표 (3, 5)야"라고 단정 짓는 대신,
"내 위치는 (3, 5)일 확률이 가장 높지만, (2.8, 5.2) 범위 안에 있을 확률이 95%야"라고 추정하는 방식입니다.

이러한 확률론적 로보틱스(Probabilistic Robotics)의 개념이 도입되면서, 로봇은 불확실한 센서 데이터 속에서도 최적의 위치를 수학적으로 계산해낼 수 있게 되었습니다. 이것이 바로 SLAM(Simultaneous Localization and Mapping) 기술의 근간이 됩니다.
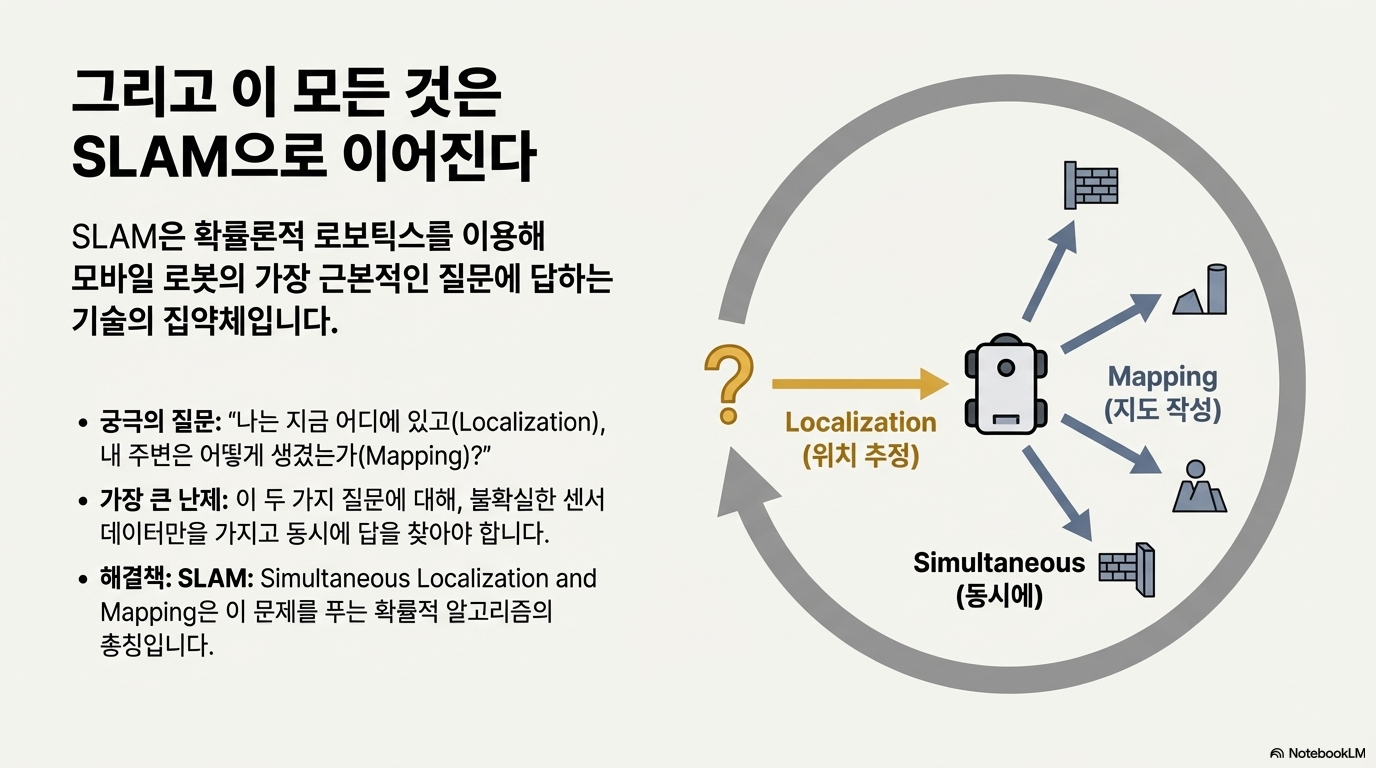
다음 포스팅에서는 이러한 확률적 배경을 바탕으로 로봇이 자신의 위치를 찾는 Localization과 지도를 그리는 Mapping에 대해 더 구체적으로 알아보겠습니다.
